I am a Ph.D. candidate at IRMV Lab, Shanghai Jiao Tong University, advised by Prof. Hesheng Wang.
My research explores how robots can learn from human behavior and understand dynamic 3D environments, with a focus on visual imitation learning, egocentric hand-object interaction prediction, place recognition, and occupancy forecasting. I am particularly interested in extracting transferable manipulation priors from human egocentric videos to alleviate the robot data bottleneck and support robotic manipulation and world modeling.
🔥 News
- July 2026: EgoLoc has been accepted by T-PAMI.🎉
- May 2026: Selected as an Outstanding Reviewer of IEEE Robotics and Automation Letters (RA-L).
- May 2026: Uni-Hand has been accepted by T-PAMI.🎉
- Nov. 2025: MADiff has been accepted by T-PAMI.🎉
- Jun. 2025: Four papers have been accepted by IROS 2025.🎉
- Feb. 2025: EfficientOCF has been accepted by CVPR 2025.🎉
📝 Publications
#: Equal contribution, *: Corresponding author.
Learning from Human Videos

Robot Learning from Human Videos: A Survey
Junyi Ma, Erhang Zhang, Haoran Yang, Ditao Li, Chenyang Xu, Guangming Wang, Hesheng Wang*
arXiv, 2026
We provide a curated reading list for robot learning from human videos (LfHV), with an emphasis on human-robot skill transfer techniques in task, observation, and action levels. It also covers representative works on human-object interaction analysis and human video sources that are widely used in the literature. (see our repository)
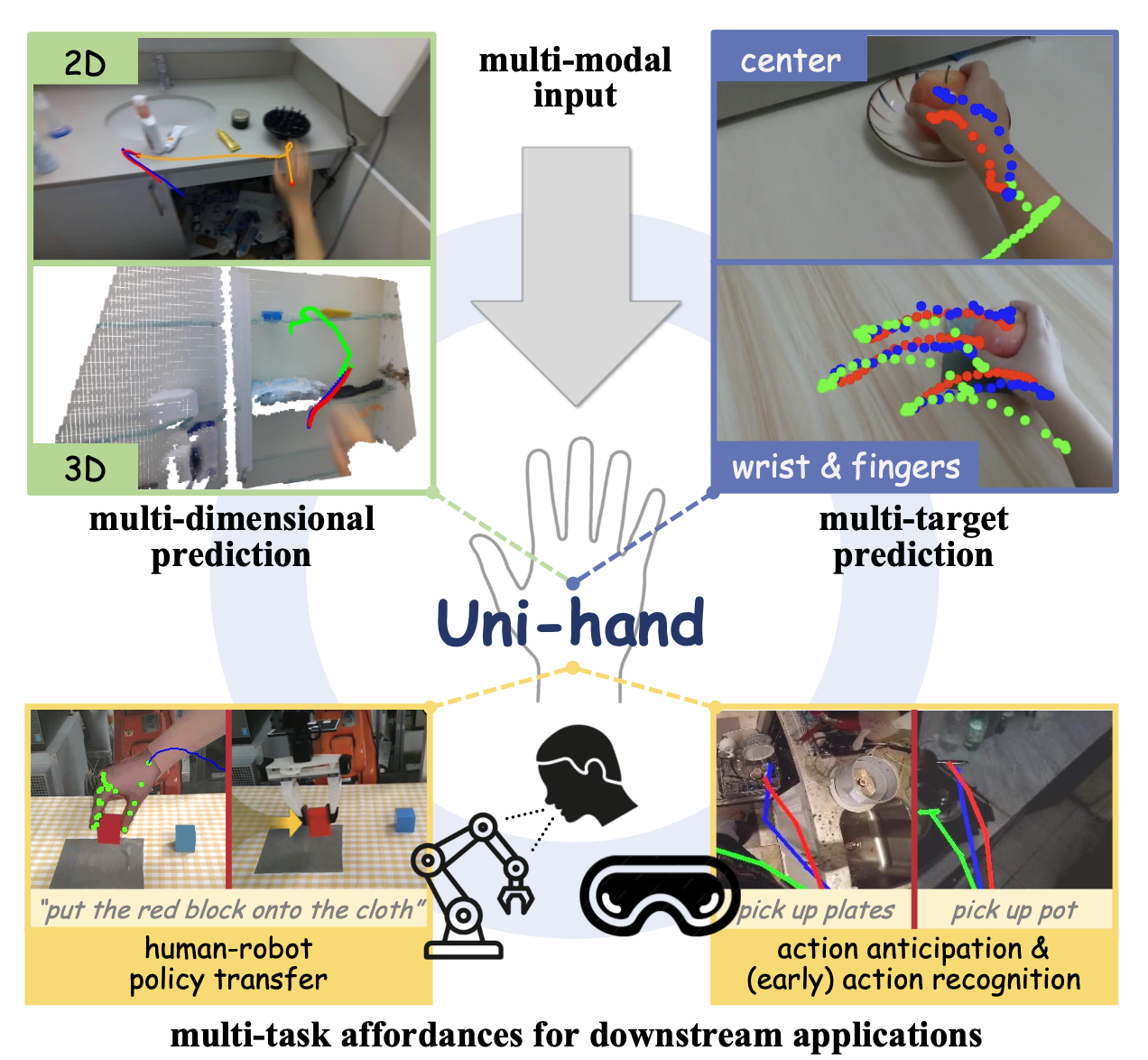
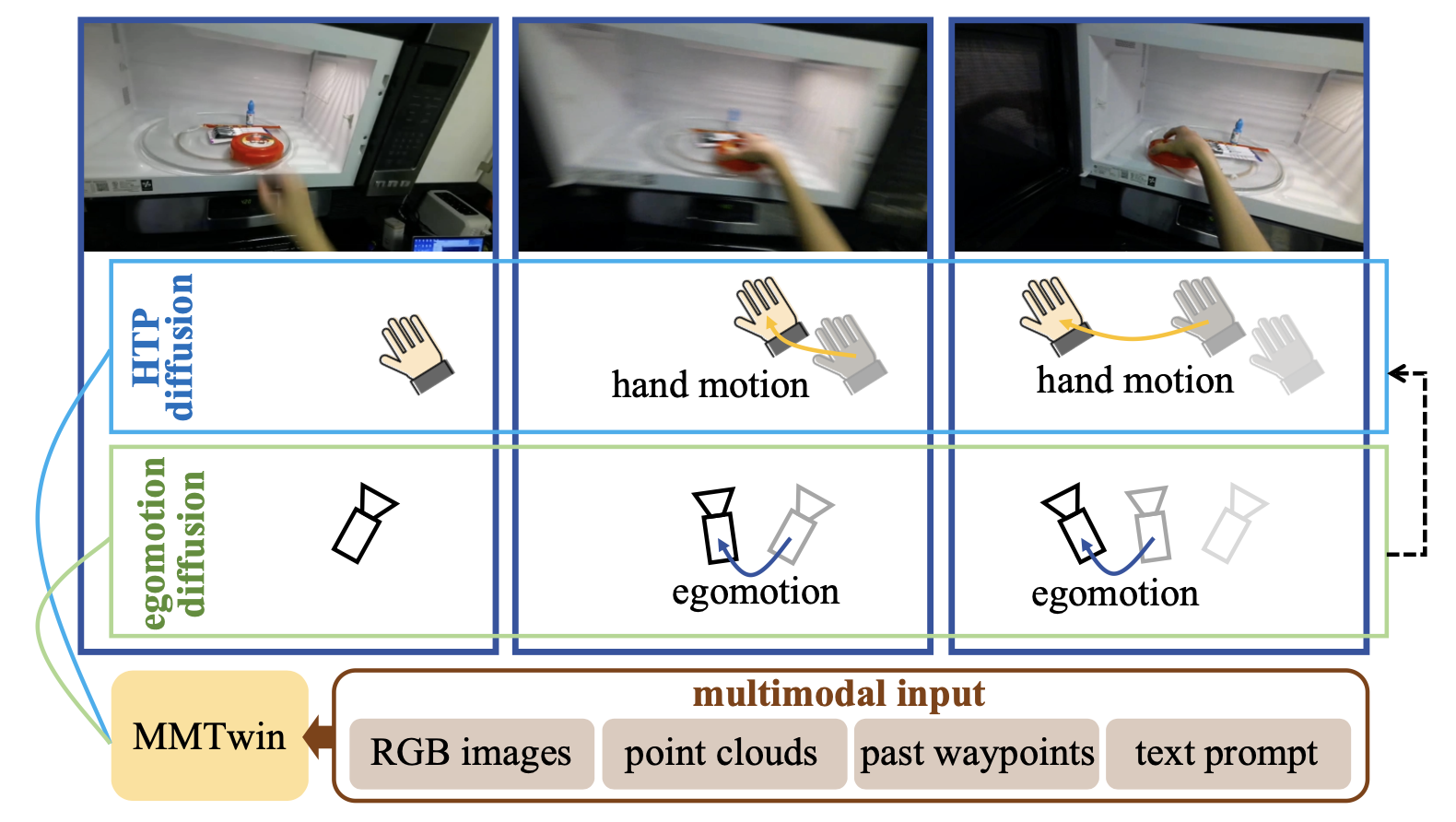
Uni-Hand: Universal Hand Motion Forecasting in Egocentric Views
Junyi Ma, Wentao Bao, Jingyi Xu, Guanzhong Sun, Yu Zheng, Erhang Zhang, Xieyuanli Chen, Hesheng Wang*
IEEE Transactions on Pattern Analysis and Machine Intelligence (T-PAMI), 2026
Uni-Hand as a World Action Model for human-robot skill transfer (see our code)
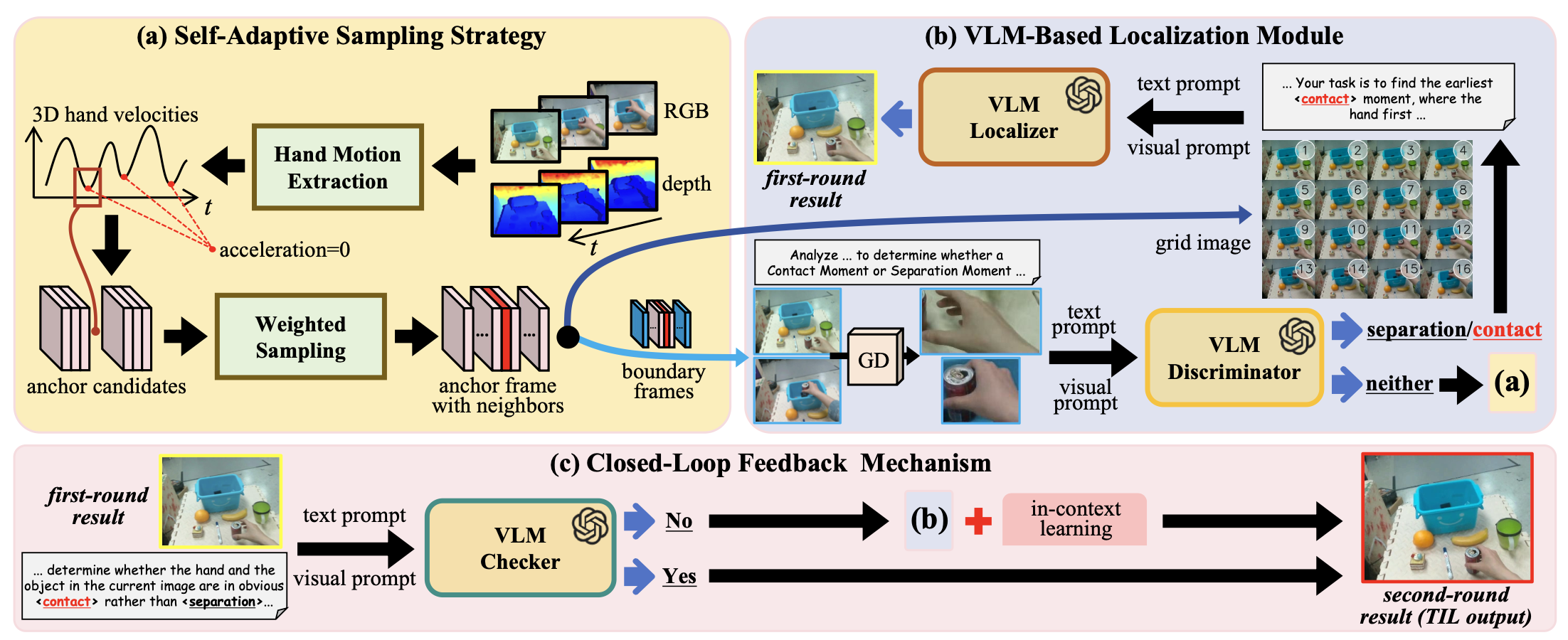
EgoLoc: A Generalizable Solution for Temporal Interaction Localization in Egocentric Videos
Junyi Ma#, Erhang Zhang#, Yin-Dong Zheng, Yuchen Xie, Yixuan Zhou, Hesheng Wang*
IEEE Transactions on Pattern Analysis and Machine Intelligence (T-PAMI), 2026
EgoLoc supports labeling human videos automatically for video-based imitation learning (see our code)
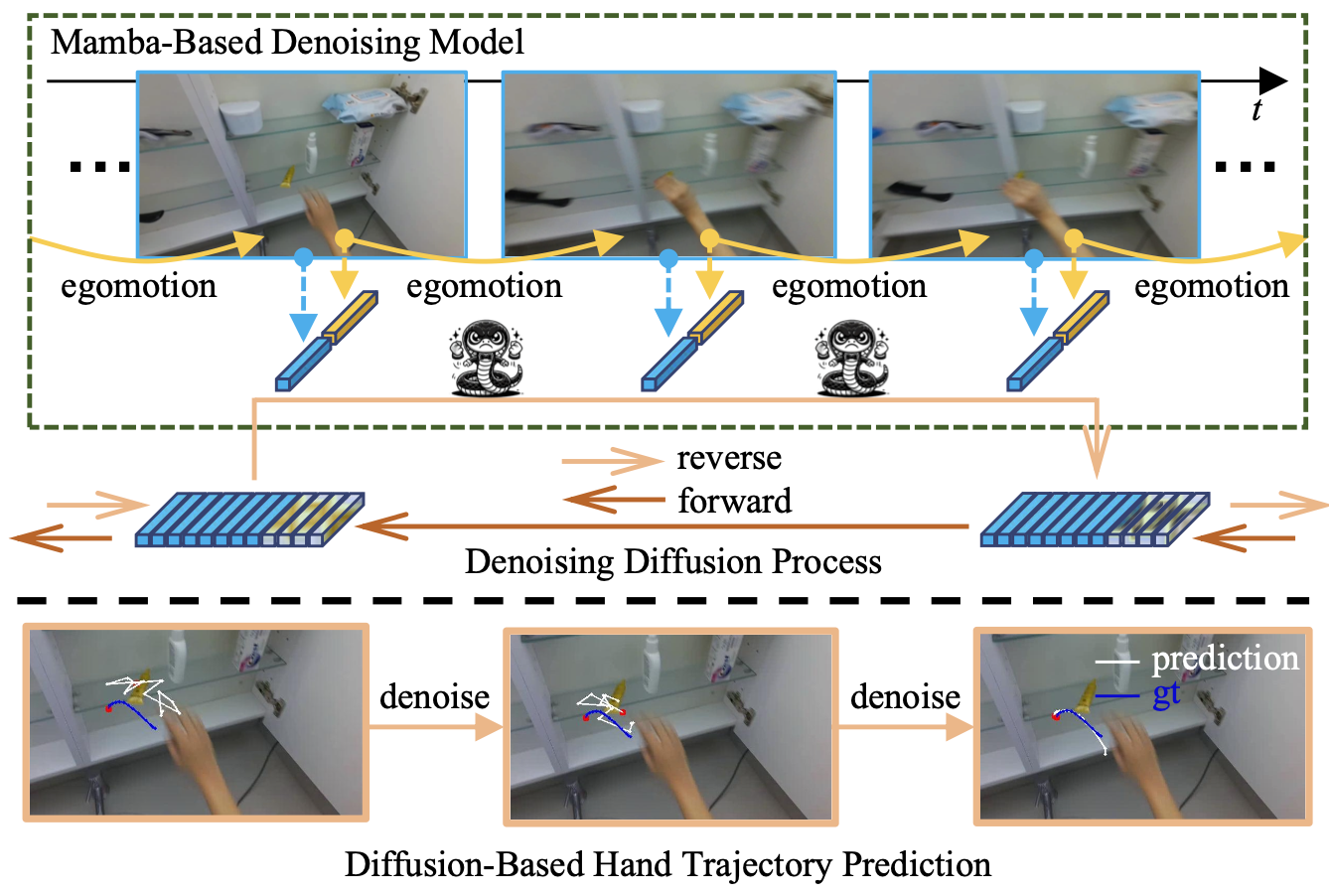
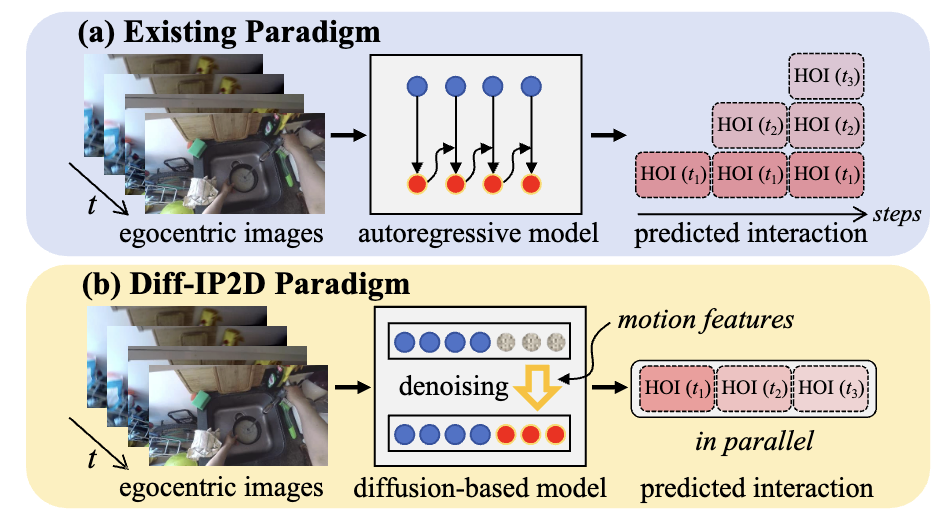
MADiff: Motion-Aware Mamba Diffusion Models for Hand Trajectory Prediction on Egocentric Videos
Junyi Ma#, Xieyuanli Chen#, Wentao Bao, Jingyi Xu, Hesheng Wang*
IEEE Transactions on Pattern Analysis and Machine Intelligence (T-PAMI), 2025
Hand motion features predicted by MADiff can improve performance of robot imitation learning (see our code)
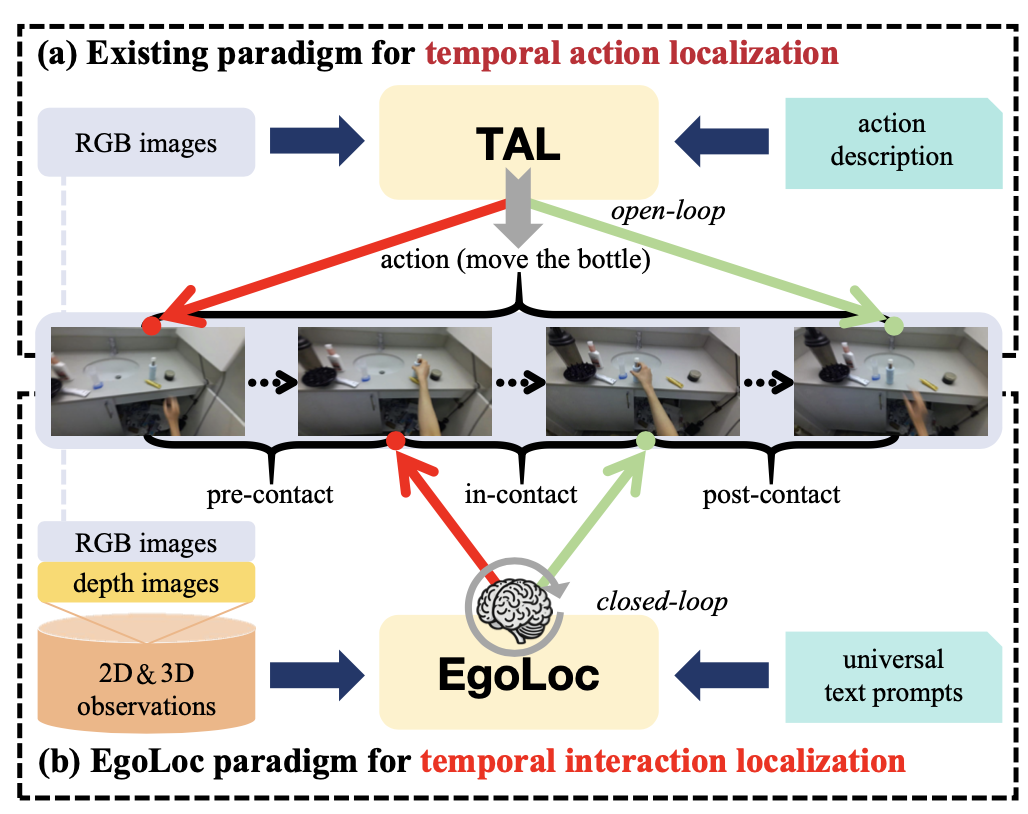
Zero-Shot Temporal Interaction Localization for Egocentric Videos
Erhang Zhang#, Junyi Ma#, Yin-Dong Zheng, Yixuan Zhou, Hesheng Wang*
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025
We are the first to systematically define the problem of extracting hand-object contact and separation moments from egocentric videos (see our code)
HOI Prediction
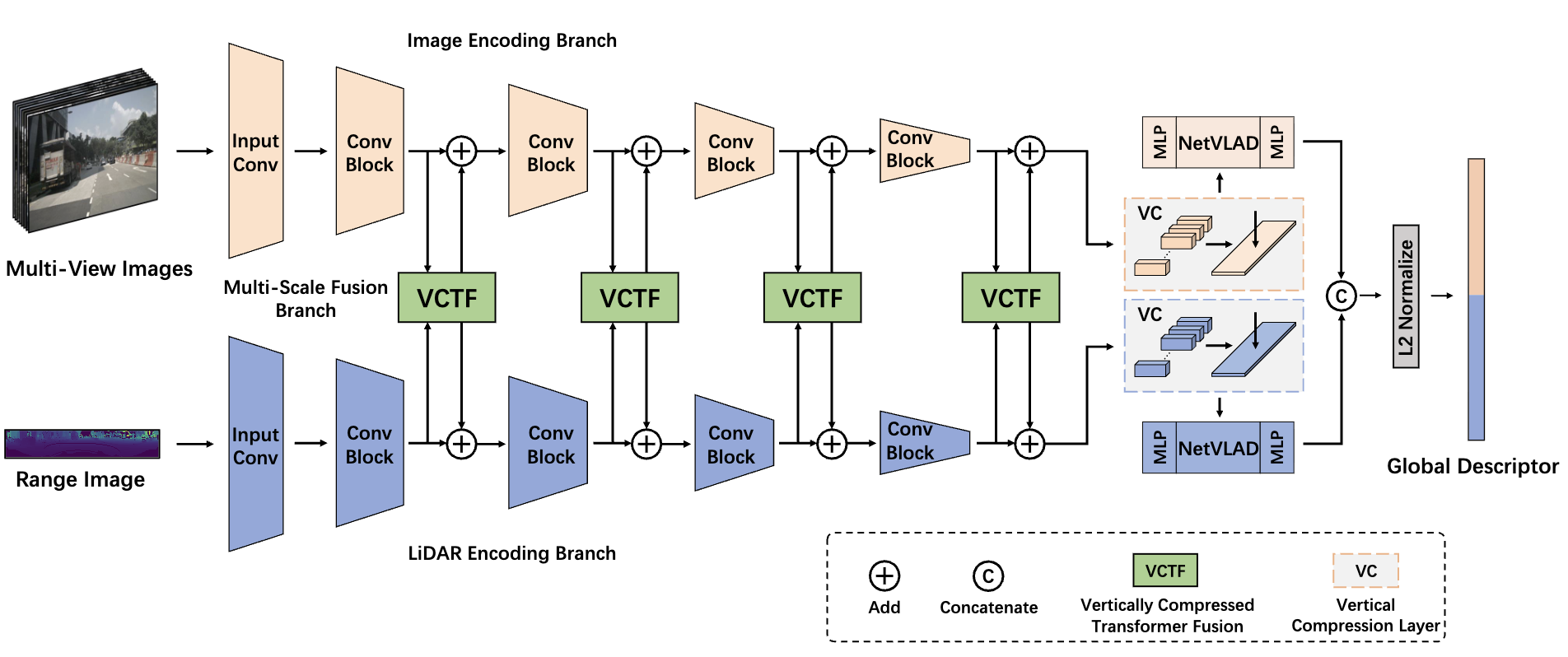
Place Recognition and SLAM
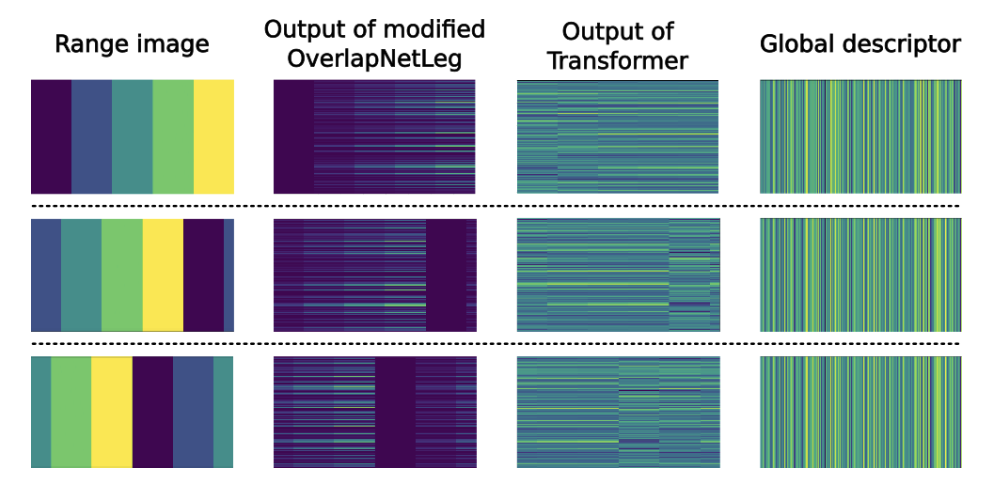
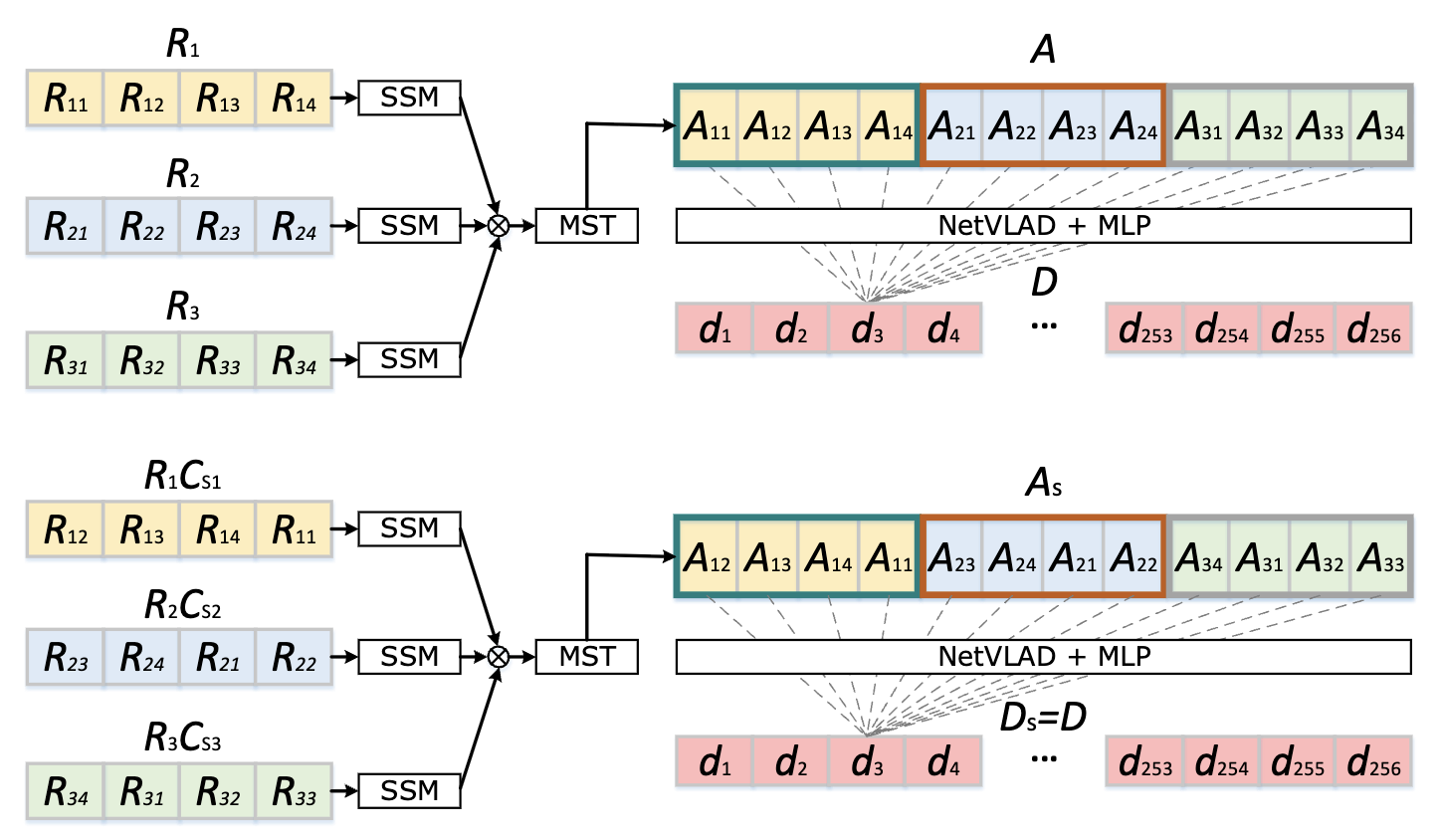
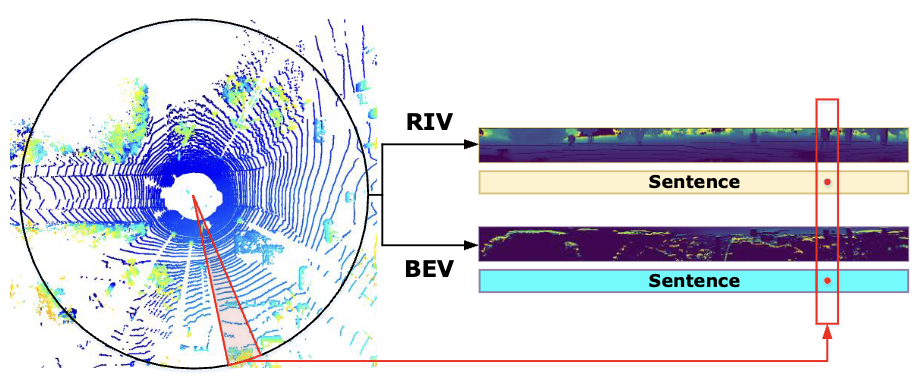
OverlapTransformer: An Efficient and Yaw-Angle-Invariant Transformer Network for LiDAR-Based Place Recognition
Junyi Ma, Jun Zhang, Jintao Xu, Rui Ai, Weihao Gu, Xieyuanli Chen*
IEEE Robotics and Automation Letters (RA-L), 2022; IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2022
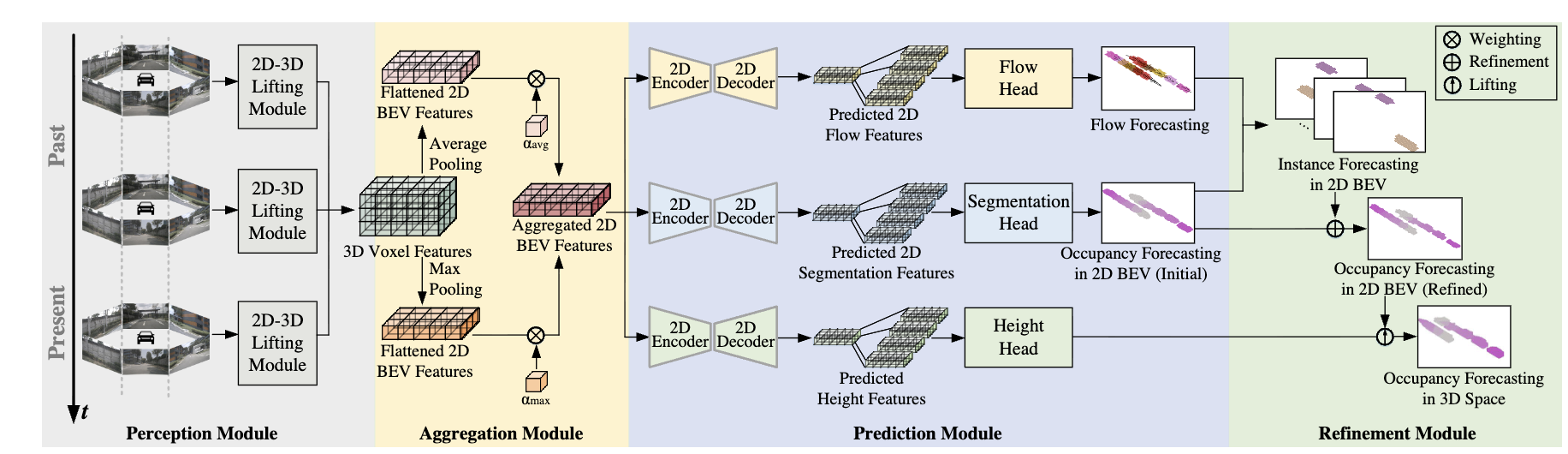
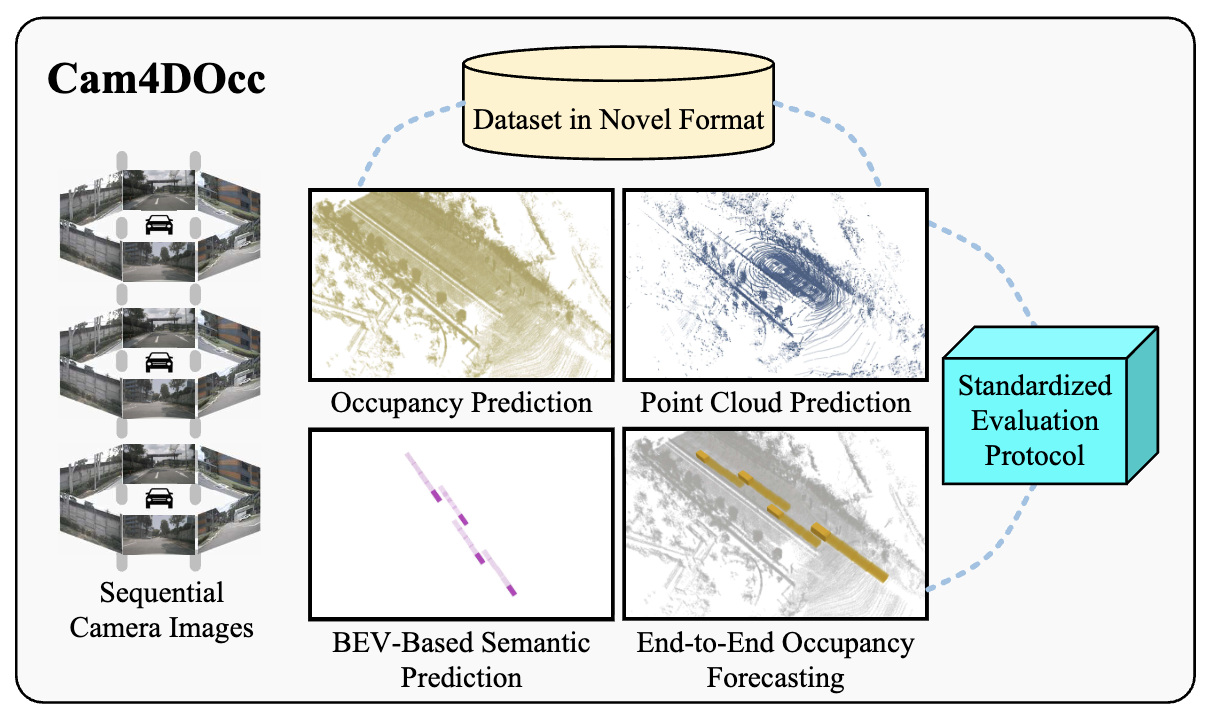
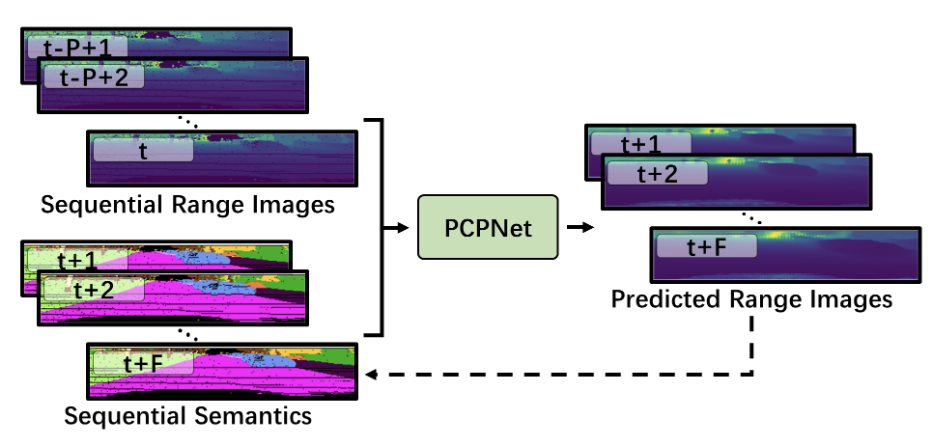
Point Cloud and Occupancy Forecasting
🏆 Honors and Awards
- Outstanding Reviewer of IEEE Robotics and Automation Letters (RA-L), 2026.
- Outstanding Master's Thesis, Beijing Institute of Technology, 2023.
- National Scholarship for Graduate Students, Ministry of Education of China, 2022.
- National Scholarship for Undergraduate Students, Ministry of Education of China, 2019.
- Outstanding Master's Graduates in Beijing, 2023.
- Outstanding Bachelor's Graduates in Beijing, 2020.
- Best Paper Award at IEEE International Conference on Unmanned Systems (ICUS), 2021.
- Outstanding Paper Presented at the Autonomous Robotic Technology Seminar (ARTS), 2023.
🎓 Educations
- Shanghai Jiao Tong University, Ph.D. candidate at IRMV Lab. Supervisor: Prof. Hesheng Wang.
- Beijing Institute of Technology, M.S. in Mechanical Engineering, 2023. Supervisors: Prof. Guangming Xiong and Prof. Xieyuanli Chen.
- Beijing Institute of Technology, B.S. in Mechanical Engineering, 2020. Bachelor thesis advisor: Prof. Oliver Dürr.
📦 Datasets
- Haomo Dataset: mobile-robot LiDAR dataset collected in urban Beijing. Description
- Cues-Poses Dataset: a toy dataset about mapping multiple cues to mutual poses of robots. Description
- Cam4DOcc: benchmark for camera-only 4D occupancy forecasting. Description
- CABH Benchmark: egocentric videos capturing human hands performing simple object manipulation tasks. Description
🎤 Invited Talks
- "人类视频驱动的机器人技能学习 (Learning to Manipulate by Watching Humans: Visual Imitation for Robotic Skills)" in ARTS Webinar&深蓝学院 link
- Breakout session "Temporal Interaction Localization for Embodied AI" at Embodied Intelligence Conference 2026 link
- "面向自动驾驶应用的激光雷达地点识别 (LiDAR-Based Place Recognition for Autonomous Driving Applications)" in 深蓝学院 link
🤝 Service
- Reviewer of TRO, TMM, RA-L, TASE, TCSVT, ICRA, and IROS.
- Session Chair for the Localization I session at IROS'24.
- Lead of the Publicity and Translation Group in the Volunteer Department for IROS'25.
- Student Executive Committee Member of Autonomous Robotic Technology Seminar (ARTS).
